7.1 Shape optimization via the shape derivative#
In this tutorial we discuss the implementation of shape optimization algorithms to solve
The analytic solution to this problem is
This problem is solved by fixing an initial guess \(\Omega_0\subset \mathbf{R}^d\) and then considering the problem
where \(X:\mathbf{R}^d \to \mathbf{R}^d\) are (at least) Lipschitz vector fields. We approximate \(X\) by a finite element function.
Initial geometry and shape function#
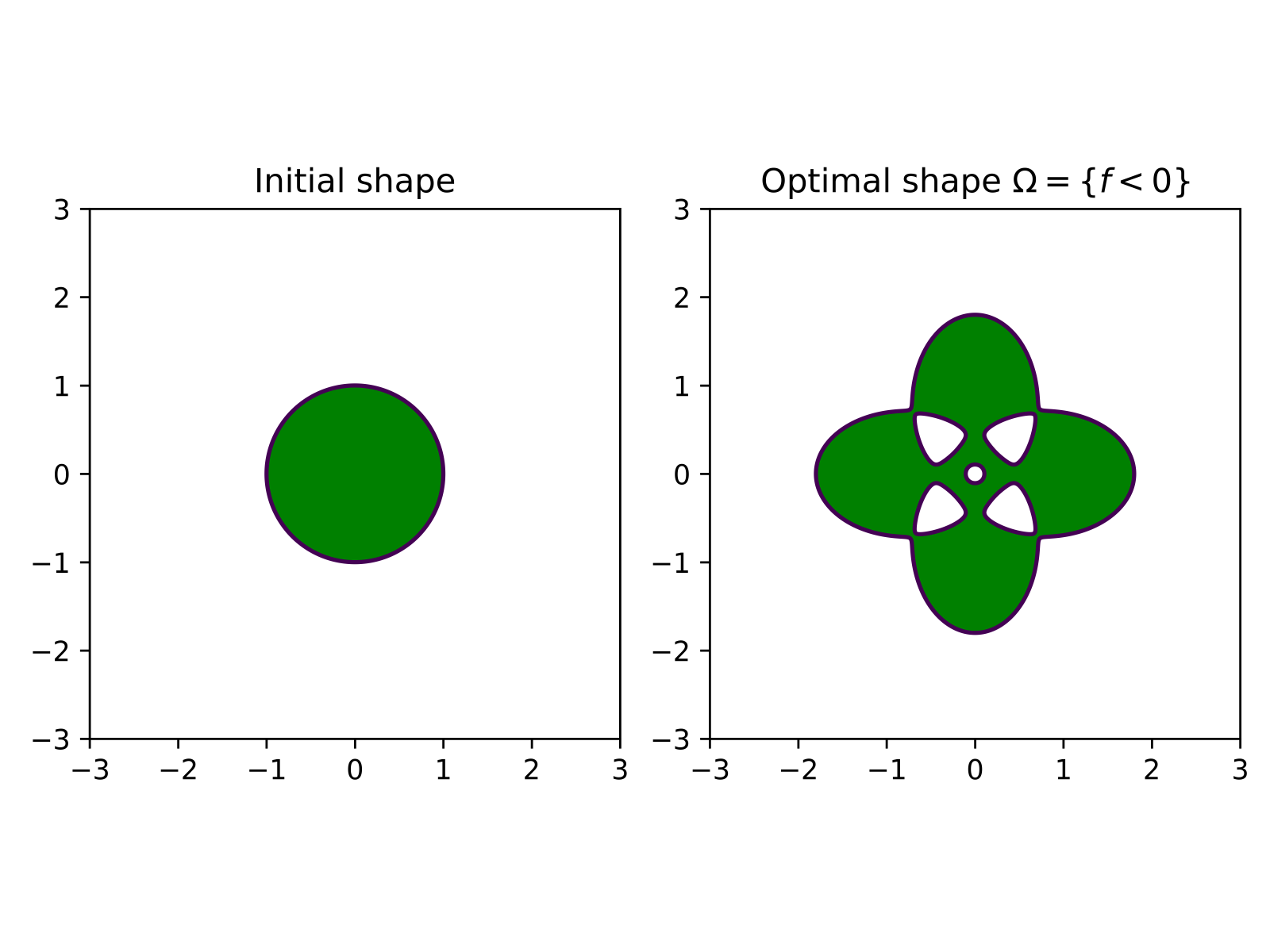
We choose \(f\) as
where \(\varepsilon = 0.001, a = 4/5, b = 2\). The corresponding zero level sets of this function are as follows. The green area indicates where \(f\) is negative.
Let us set up the geometry.
[ ]:
# Generate the geometry
from ngsolve import *
# load Netgen/NGSolve and start the gui
from ngsolve.webgui import Draw
from netgen.geom2d import SplineGeometry
geo = SplineGeometry()
geo.AddCircle((0,0), r = 2.5)
ngmesh = geo.GenerateMesh(maxh = 0.08)
mesh = Mesh(ngmesh)
mesh.Curve(2)
[ ]:
#gfset.vec[:]=0
#gfset.Set((0.2*x,0))
#mesh.SetDeformation(gfset)
#scene = Draw(gfzero,mesh,"gfset", deformation = gfset)
[ ]:
# define the function f and its gradient
a =4.0/5.0
b = 2
f = CoefficientFunction((sqrt((x - a)**2 + b * y**2) - 1) \
* (sqrt((x + a)**2 + b * y**2) - 1) \
* (sqrt(b * x**2 + (y - a)**2) - 1) \
* (sqrt(b * x**2 + (y + a)**2) - 1) - 0.001)
# gradient of f defined as vector valued coefficient function
grad_f = CoefficientFunction((f.Diff(x),f.Diff(y)))
[ ]:
# vector space for shape gradient
VEC = H1(mesh, order=1, dim=2)
# grid function for deformation field
gfset = GridFunction(VEC)
gfX = GridFunction(VEC)
Draw(gfset)
Shape derivative#
[ ]:
# Test and trial functions
PHI, PSI = VEC.TnT()
# shape derivative
dJOmega = LinearForm(VEC)
dJOmega += (div(PSI)*f + InnerProduct(grad_f, PSI) )*dx
Bilinear form#
to compute the gradient \(X:= \mbox{grad}J(\Omega)\) by
[ ]:
# bilinear form for H1 shape gradient; aX represents b_\Omega
aX = BilinearForm(VEC)
aX += InnerProduct(grad(PHI) + grad(PHI).trans, grad(PSI)) * dx
aX += InnerProduct(PHI, PSI) * dx
The first optimisation step#
Fix an initial domain \(\Omega_0\) and define
Then we have the following relation between the derivative of \(\mathcal J_{\Omega_0}\) and the shape derivative of \(J\):
Here
\((\mbox{id}+X_n)(\Omega_0)\) is current shape
Now we note that \(\varphi \mapsto \varphi\circ(\mbox{id}+X_n)^{-1}\) maps the finite element space on \((\mbox{id}+X_n)(\Omega_0)\) to the finite element space on \(\Omega_0\). Therefore the following are equivalent:
assembling \(\varphi \mapsto D\mathcal J_{\Omega_0}(X_n)(\varphi)\) on the fixed domain \(\Omega_0\)
assembling \(\varphi \mapsto DJ((\mbox{id}+X_n)(\Omega_0))(\varphi)\) on the deformed domain \((\mbox{id}+X_n)(\Omega_0)\).
[ ]:
# deform current domain with gfset
mesh.SetDeformation(gfset)
# assemble on deformed domain
aX.Assemble()
dJOmega.Assemble()
mesh.UnsetDeformation()
# unset deformation
Now let’s make one optimization step with step size \(\alpha_1>0\):
[ ]:
# compute X_0
gfX.vec.data = aX.mat.Inverse(VEC.FreeDofs(), inverse="sparsecholesky") * dJOmega.vec
print("current cost ", Integrate(f*dx, mesh))
print("Gradient norm ", Norm(gfX.vec))
alpha = 20.0 / Norm(gfX.vec)
gfset.vec[:]=0
scene = Draw(gfset)
# input("A")
gfset.vec.data -= alpha * gfX.vec
mesh.SetDeformation(gfset)
#draw deformed shape
scene.Redraw()
# input("B")
print("cost after gradient step:", Integrate(f, mesh))
mesh.UnsetDeformation()
scene.Redraw()
Optimisation loop#
Now we can set up an optimisation loop. In the second step we compute
by the same procedure as above.
[ ]:
import time
iter_max = 50
gfset.vec[:] = 0
mesh.SetDeformation(gfset)
scene = Draw(gfset,mesh,"gfset")
converged = False
alpha =0.11#100.0 / Norm(gfX.vec)
# input("A")
for k in range(iter_max):
mesh.SetDeformation(gfset)
scene.Redraw()
Jold = Integrate(f, mesh)
print("cost at iteration ", k, ': ', Jold)
# assemble bilinear form
aX.Assemble()
# assemble shape derivative
dJOmega.Assemble()
mesh.UnsetDeformation()
gfX.vec.data = aX.mat.Inverse(VEC.FreeDofs(), inverse="sparsecholesky") * dJOmega.vec
# step size control
gfset_old = gfset.vec.CreateVector()
gfset_old.data = gfset.vec
Jnew = Jold + 1
while Jnew > Jold:
gfset.vec.data = gfset_old
gfset.vec.data -= alpha * gfX.vec
mesh.SetDeformation(gfset)
Jnew = Integrate(f, mesh)
mesh.UnsetDeformation()
if Jnew > Jold:
print("reducing step size")
alpha = 0.9*alpha
else:
print("linesearch step accepted")
alpha = alpha*1.5
break
print("step size: ", alpha, '\n')
time.sleep(0.1)
Jold = Jnew
Using SciPy optimize toolbox#
We use the package scipy.optimize and wrap the shape functions around it.
We first setup the initial geometry as a circle of radius r = 2.5 (as before)
[ ]:
# The code in this cell is the same as in the example above.
from ngsolve import *
from ngsolve.webgui import Draw
from netgen.geom2d import SplineGeometry
import numpy as np
ngsglobals.msg_level = 1
geo = SplineGeometry()
geo.AddCircle((0,0), r = 2.5)
ngmesh = geo.GenerateMesh(maxh = 0.08)
mesh = Mesh(ngmesh)
mesh.Curve(2)
# define the function f
a =4.0/5.0
b = 2
f = CoefficientFunction((sqrt((x - a)**2 + b * y**2) - 1) \
* (sqrt((x + a)**2 + b * y**2) - 1) \
* (sqrt(b * x**2 + (y - a)**2) - 1) \
* (sqrt(b * x**2 + (y + a)**2) - 1) - 0.001)
# Now we define the finite element space VEC in which we compute the shape gradient
# element order
order = 1
VEC = H1(mesh, order=order, dim=2)
# define test and trial functions
PHI = VEC.TrialFunction()
PSI = VEC.TestFunction()
# define grid function for deformation of mesh
gfset = GridFunction(VEC)
gfset.Set((0,0))
# only for new gui
#scene = Draw(gfset, mesh, "gfset")
#if scene:
# scene.setDeformation(True)
# plot the mesh and visualise deformation
#Draw(gfset,mesh,"gfset")
#SetVisualization (deformation=True)
Shape derivative#
[ ]:
fX = LinearForm(VEC)
# analytic shape derivative
fX += f*div(PSI)*dx + (f.Diff(x,PSI[0])) *dx + (f.Diff(y,PSI[1])) *dx
Bilinear form for shape gradient#
Define the bilinear form
to compute the gradient \(X =: \mbox{grad}J\) by
[ ]:
# Cauchy-Riemann descent CR
CR = False
# bilinear form for gradient
aX = BilinearForm(VEC)
aX += InnerProduct(grad(PHI)+grad(PHI).trans, grad(PSI))*dx + InnerProduct(PHI,PSI)*dx
## Cauchy-Riemann regularisation
if CR == True:
gamma = 100
aX += gamma * (PHI.Deriv()[0,0] - PHI.Deriv()[1,1])*(PSI.Deriv()[0,0] - PSI.Deriv()[1,1]) *dx
aX += gamma * (PHI.Deriv()[1,0] + PHI.Deriv()[0,1])*(PSI.Deriv()[1,0] + PSI.Deriv()[0,1]) *dx
aX.Assemble()
invaX = aX.mat.Inverse(VEC.FreeDofs(), inverse="sparsecholesky")
gfX = GridFunction(VEC)
Wrapping the shape function and its gradient#
Now we define the shape function \(J\) and its gradient grad(J) use the shape derivative \(DJ\). The arguments of \(J\) and grad(J) are vector in \(\mathbf{R}^d\), where \(d\) is the dimension of the finite element space.
[ ]:
def J(x_):
gfset.Set((0,0))
# x_ NumPy vector
gfset.vec.FV().NumPy()[:] += x_
mesh.SetDeformation(gfset)
cost_c = Integrate (f, mesh)
mesh.UnsetDeformation()
Redraw(blocking=True)
return cost_c
def gradJ(x_, euclid = False):
gfset.Set((0,0))
# x_ NumPy vector
gfset.vec.FV().NumPy()[:] += x_
mesh.SetDeformation(gfset)
fX.Assemble()
mesh.UnsetDeformation()
if euclid == True:
gfX.vec.data = fX.vec
else:
gfX.vec.data = invaX * fX.vec
return gfX.vec.FV().NumPy().copy()
Gradient descent and Armijo rule#
We use the functions \(J\) and grad J to define a steepest descent method.We use scipy.optimize.line_search_armijo to compute the step size in each iteration. The Arjmijo rule reads
where \(c_1:= 1e-4\) and \(\alpha_k\) is the step size.
[ ]:
# import scipy linesearch method
from scipy.optimize.linesearch import line_search_armijo
def gradient_descent(x0, J_, gradJ_):
xk_ = np.copy(x0)
# maximal iteration
it_max = 50
# count number of function evals
nfval_total = 0
print('\n')
for i in range(1, it_max):
# Compute a step size using a line_search to satisfy the Wolf
# compute shape gradient grad J
grad_xk = gradJ_(xk_,euclid = False)
# compute descent direction
pk = -gradJ_(xk_)
# eval cost function
fold = J_(xk_)
# perform armijo stepsize
if CR == True:
alpha0 = 0.15
else:
alpha0 = 0.11
step, nfval, b = line_search_armijo(J_, xk_, pk = pk, gfk = grad_xk, old_fval = fold, c1=1e-4, alpha0 = alpha0)
nfval_total += nfval
# update the shape and print cost and gradient norm
xk_ = xk_ - step * grad_xk
print('Iteration ', i, '| Cost ', fold, '| grad norm', np.linalg.norm(grad_xk))
mesh.SetDeformation(gfset)
scene.Redraw()
mesh.UnsetDeformation()
if np.linalg.norm(gradJ_(xk_)) < 1e-4:
#print('#######################################')
print('\n'+'{:<20} {:<12} '.format("##################################", ""))
print('{:<20} {:<12} '.format("### success - accuracy reached ###", ""))
print('{:<20} {:<12} '.format("##################################", ""))
print('{:<20} {:<12} '.format("gradient norm: ", np.linalg.norm(gradJ_(xk_))))
print('{:<20} {:<12} '.format("n evals f: ", nfval_total))
print('{:<20} {:<12} '.format("f val: ", fold) + '\n')
break
elif i == it_max-1:
#print('######################################')
print('\n'+'{:<20} {:<12} '.format("#######################", ""))
print('{:<20} {:<12} '.format("### maxiter reached ###", ""))
print('{:<20} {:<12} '.format("#######################", ""))
print('{:<20} {:<12} '.format("gradient norm: ", np.linalg.norm(gradJ_(xk_))))
print('{:<20} {:<12} '.format("n evals f: ", nfval_total))
print('{:<20} {:<12} '.format("f val: ", fold) + '\n')
Now we are ready to run our first optimisation algorithm:#
[ ]:
gfset.vec[:]=0
x0 = gfset.vec.FV().NumPy() # initial guess = 0
scene = Draw(gfset, mesh, "gfset")
gradient_descent(x0, J, gradJ)
L-BFGS method#
Now we use the L-BFGS method provided by SciPy. The BFGS method requires the shape function \(J\) and its gradient grad J. We can also specify additional arguments in options, such as maximal iterations and the gradient tolerance.
In the BFGS method we replace
by
where \(H_\Omega\) is an approximation of the second shape derivative at \(\Omega\). On the discrete level we solve
[ ]:
from scipy.optimize import minimize
x0 = gfset.vec.FV().NumPy()
# options for optimiser
options = {"maxiter":1000,
"disp":True,
"gtol":1e-10}
# we use quasi-Newton method L-BFGS
minimize(J, x0, method='L-BFGS-B', jac=gradJ, options=options)
Improving mesh quality via Cauchy-Riemann equations#
In the previous section we computed the shape gradient grad J:= X of \(J\) at \(\Omega\) via
This may lead to overly stretched or even degenerated triangles. One way to improve this is to modify the above equation by
where
The two equations \(BX = 0\) are precisely the Cauchy-Riemann equations \(-\partial_x X_1 + \partial_y X_2=0\) and \(\partial_y X_1 + \partial_x X_2\). So the bigger \(\gamma\) the more angle preserving is the gradient. So by adding the B term we enforce conformaty with strength \(\gamma\).
This only means we need to add the \(\alpha\) term to the above bilinear form aX:
[ ]:
alpha = 100
aX += alpha * (PHI.Deriv()[0,0] - PHI.Deriv()[1,1])*(PSI.Deriv()[0,0] - PSI.Deriv()[1,1]) *dx
aX += alpha * (PHI.Deriv()[1,0] + PHI.Deriv()[0,1])*(PSI.Deriv()[1,0] + PSI.Deriv()[0,1]) *dx
[ ]: